Что-то давно ничего не писал. Наверное, новогодние праздники помешали. Но алкомарафон закончился, поэтому неплохо бы вернуться к нашему контроллеру.
Отступать больше некуда, поэтому пора перенести наши наработки в реальность. Или говоря простым языком, заставить железный контроллер выполнять нашу задачу.
Так как программировать лучше дома, сидя в тепле и уюте, то я ничего сразу паять не буду. И более того. вам не советую. Лучше всего сначала все “обкатать” в контролируемой обстановке, когда возникновение ошибок сведено к минимуму.
Возьмем наш первоначальный алгоритм. Если напряжение поднялось больше 13В, то замкнуть реле ближнего света. Где мы тут можем ошибиться? Да везде – от подбора резисторов для делителя напряжения до распайки реле и неправильного подсоединения. Поэтому сокращаем возможность ошибки до минимума: вместо делителя напряжения бортовой сети воспользуемся обычным переменным резистором, а вместо реле – обычным светодиодиком. Как подключать – я уже писал в предидущем посте. Но если у вас, как и у меня, плата discovery, то там уже есть светодиодики (а значит, вероятность ошибки снижается еще сильнее).
Что бы не ошибиться и быть наглядней, я воспользуюсь макетной платой и специальными проводами для нее. Все это доступно там же, в любом магазине электроники.
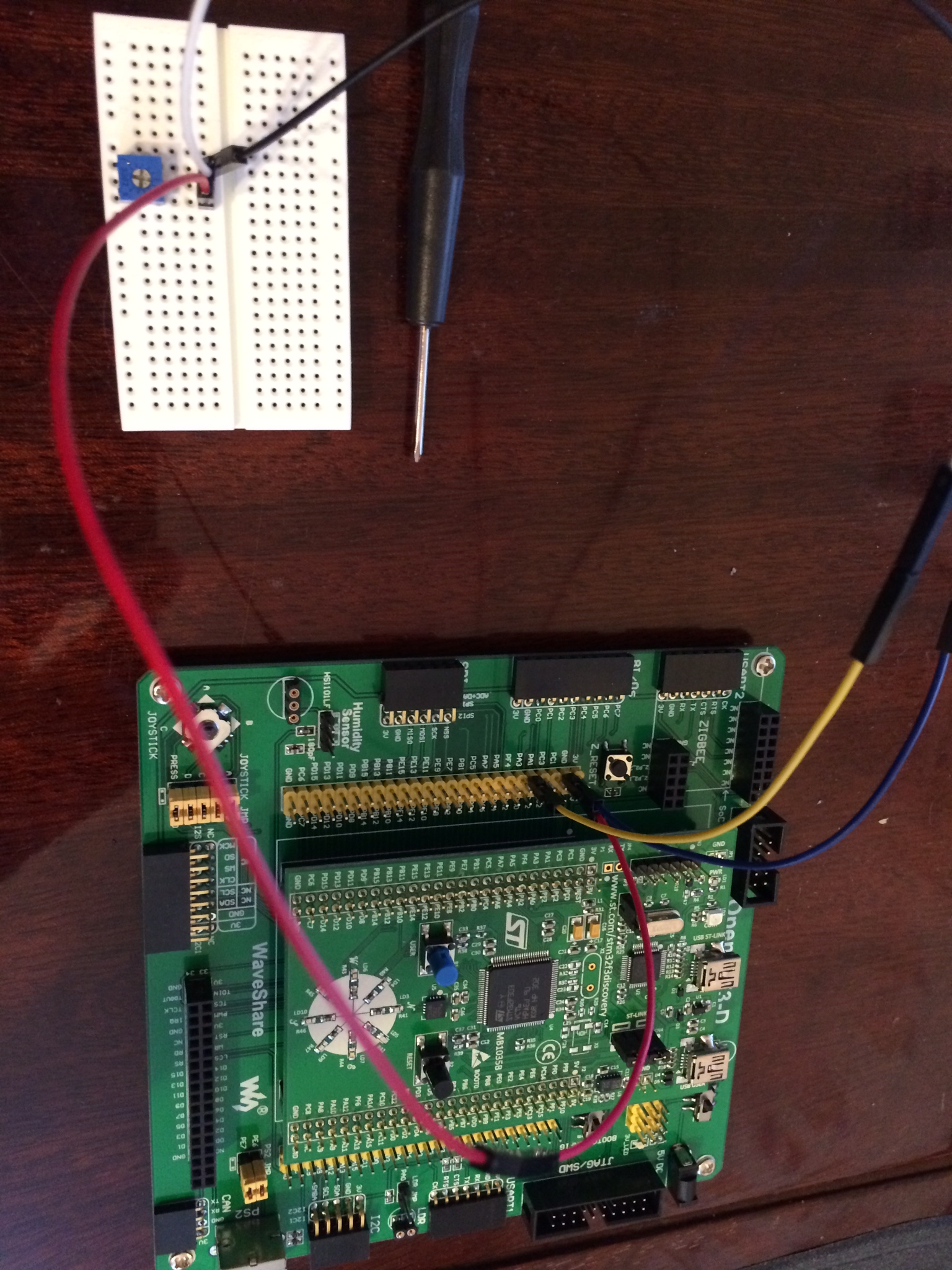
Как видно из фотографии, я подключил переменный резистор к GND и 3V, а вывод движка резистора – на PA1. В итоге даже в самом плохом случае, когда я выверну резистор “до упора”, на ножку контроллера попадут безопасные 3 вольта.
Теперь пора описать, где и как писать код. Открываем сгенерированный пару постов назад код и находим в левой панели фаил main.c. В нем ищем кусок кода while(1), как показано на картинке
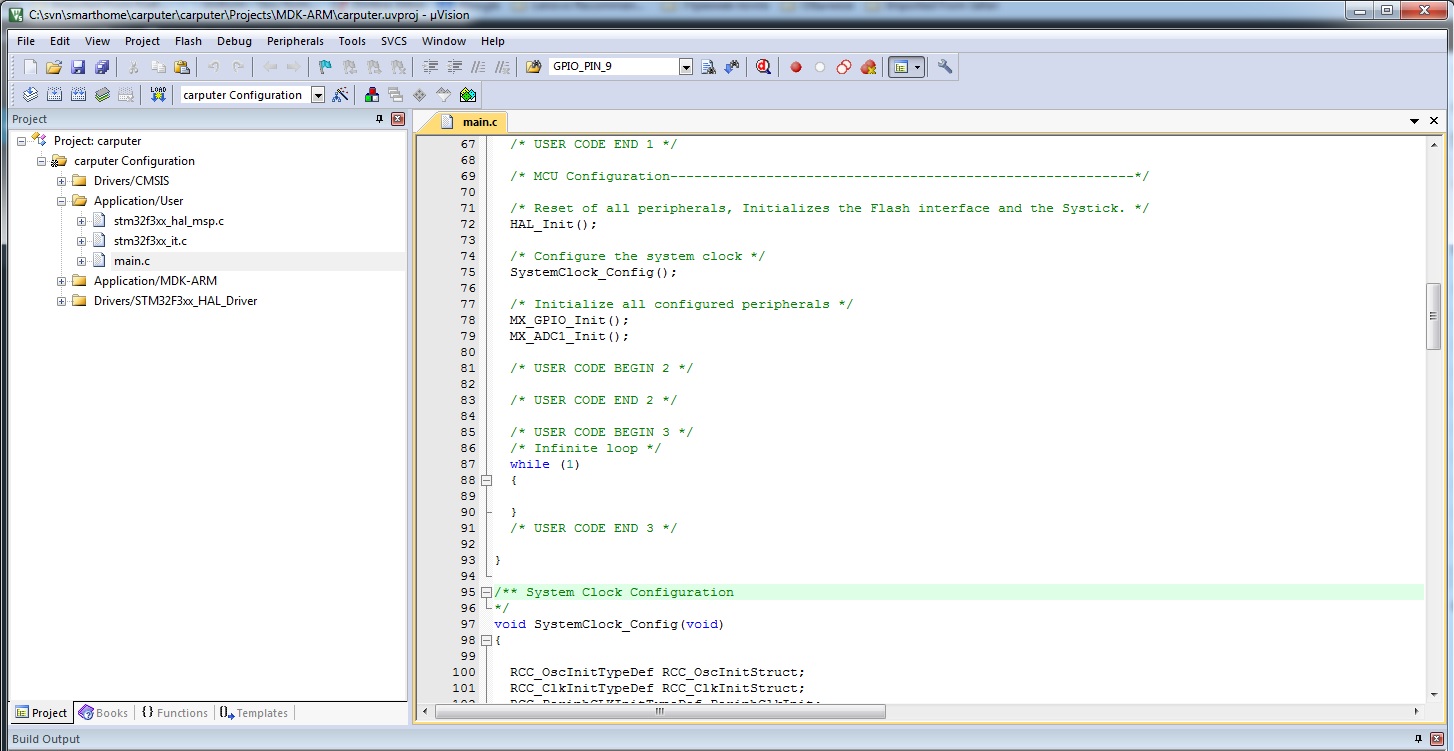
Вот все, что будет расположено между фигурными скобочками и будет выполняться бесконечно (для тех. кто знаком с ардуиной, это void loop()). Писать надо на языке С, обучать которому я тоже тут не буду.
Еще одно отступление – как управлять выводами. У ардуины есть кошмар под названием port mapping (это когда при смене контроллера все назания ножек меняются и программы перестают работать), на stm тоже до недавнего времени такой кошмар был. Именно был, сейчас все проще.
Итак, если вы посмотрите на микроконтроллер, что обнаружите, что ножки нумеруются от PA0 до PF15. Все функции используют следущую нумерацию ножек – Блок от А до F и номер ножки в блоке.
Переведение ножки PC12 в “высокое” состояние
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_12,GPIO_PIN_SET);
А ножку PE15 – в “низкое”
HAL_GPIO_WritePin(GPIOE,GPIO_PIN_15,GPIO_PIN_RESET);
Выдаем на 1й канал ЦАП значение переменной s
HAL_DAC_SetValue(&hdac, DAC_CHANNEL_1, DAC_ALIGN_12B_R, s);
И мной написанная (или подправленная) функция для чтения значения АЦП
static int GetADCValue(uint32_t Channel,uint32_t Count)
{
int val = 0;
ADC_ChannelConfTypeDef sConfig;
sConfig.Channel=Channel;
sConfig.Rank=1;
sConfig.SamplingTime=10;
HAL_ADC_ConfigChannel(&hadc,&sConfig);
for(int i = 0; i < Count; i++) { HAL_ADC_Start(&hadc); HAL_ADC_PollForConversion(&hadc,1); val += HAL_ADC_GetValue(&hadc); } return val / Count; }
Как видно из кода, работает только с ADC1 (ссылки hadc).
В посте описать все невозможно, поэтому рекомендую заглянуть в "Firmware", которую скачал STMCube, и посмотреть там примеры.
Итак, вот мой код
if(GetADCValue(2,3)>2048)
{
HAL_GPIO_WritePin(GPIOE,GPIO_PIN_15,GPIO_PIN_SET);
}
else
{
HAL_GPIO_WritePin(GPIOE,GPIO_PIN_15,GPIO_PIN_RESET);
}
В чем его суть? Если значение, которое прочитали из АЦП, больше 2048, то перевести ножку PE15 на высокий уровень. Если меньше, что наоборот, на низкий.
В чем магия? Магия в двух вещах. Первое, это значение АЦП. Оно может быть от 0 до 4095 (3В на ножке). Как им распорядиться, решать вам. А второе - ножка PE15 на плате подключена с зеленому светодиоду.
Компилируем, заливаем (иконка с буковками LOAD во втором ряду) и наслаждаемся своей первой программой.
Сам код (полностью готовый и скомпилированный) можно взять отсюда http://multik.org/carsim/carputer.rar
Что дальше? А дальше пишем, отлаживаем и снова пишем. Пока не будет готово то, что требовалось изначально.
Желаю удачи в написании своих проектов!
А я чуть попозже напишу о том, как перенести написанное в "железо". Печатные платы и прочие радости радиогубителей 🙂